Contribution to SDGs
Contributing to society through providing products and services
Next-generation transportation infrastructure that supports safe and comfortable travel in the age of autonomous driving
Due to the increasing sophistication of autonomous driving technology, there is a growing need for cooperative autonomous driving in which transportation infrastructure consisting of various equipment including traffic lights and autonomous driving vehicles work together. Nippon Signal has developed a system that can support safe and comfortable autonomous driving by providing signal information and danger information from the infrastructure to autonomous driving vehicles. This system can be introduced on various scales, from a single intersection to a comprehensive road network, or parking lots in the center of a city.
Social challenges in the future
- ・ Shortage of human resources providing public transportation services due to declining birthrate and aging population, and population concentration in urban areas
- ・ Difficulty of maintaining public transportation services
Providing signal information and danger information from the infrastructure to autonomous driving vehicles
Contributing to the solution of social challenges in areas where it is difficult to maintain transportation services through supporting safe and comfortable travel in the age of autonomous driving
Contributing to the solution of social challenges as a company that supports the evolution of transportation infrastructure
We are currently taking on the challenge of further enhancement of the functions of the vehicle-infrastructure cooperative autonomous driving system. We are working to improve the accuracy, reliability, and robustness (characteristics that are less likely to be affected by external factors) of sensors installed on the infrastructure side that detect danger information, and to increase information processing speed to provide such information in real time. In addition, we are working toward the practical realization of an automated valet parking system by tackling challenges such as the development of route generation technology for autonomous driving cars and the improvement of adaptability to a wide range of vehicles.
The vehicle-infrastructure cooperative autonomous driving system will also contribute to solving social challenges such as shortage of human resources providing public transportation services due to the declining birthrate and aging population, which will make it difficult to maintain services in some areas. Services expected to be put into practice in the future include circulation buses that provide the last mile of local public transportation, demand buses that will circle a specific area in response to requests for rides, and BRT *1, which is attracting attention as a new bus-based means of transportation. We will promote the commercialization of a vehicle-infrastructure cooperative autonomous driving system by leveraging our achievements accumulated through verification tests as well as our position in being able to provide consultation as a partner to railway operators and local governments.
*1 BRT: Bus Rapid Transit

Providing signal information + danger information to autonomous driving cars
In 2017, we participated in the Smart Mobility Promotion Consortium to conduct verification tests on autonomous driving buses at Ito Campus, Kyushu University, and started to develop a system that supports autonomous driving cars from ground infrastructure. Initially, we worked on the development of technology to provide signal information to autonomous driving vehicle cars, and subsequently, through conducting demonstration experiments in various places, we have further developed the technology into a system that provides signal information + danger information (pedestrians rushing out, oncoming vehicles, etc.).
In October 2020, we participated in the Medium-sized Autonomous Driving Bus Demonstration Experiment held in Kitakyushu City and Kanda Town, Fukuoka Prefecture, the first test on public roads in which autonomous driving vehicles were supported from intersections. We conducted various experiments including verification of a mechanism to prevent sudden braking by notifying the color of traffic lights and the time remaining to an autonomous driving bus in real time, and an experiment to prevent accidents when turning left or right at an intersection with poor visibility by calculating the risk of collisions with vehicles, bicycles, pedestrians, etc. and reporting calculation results to an autonomous driving bus in real time. Furthermore, in February 2021, we participated in demonstration experiments on public roads toward the social implementation of autonomous driving buses around Hatogaya Station in Kawaguchi City, Saitama Prefecture. In addition to verifying a technology to provide signal information and danger information at signalized intersections, we conducted various programs including the verification of a technology to provide merging support for buses turning right onto a priority road at unsignalized intersections by providing danger information, as well as verification of the effectiveness of a technology to prevent, at the time of an autonomous driving bus approaching a push-button traffic light, sudden braking immediately after the light turns yellow after the push-button was pressed, by extending the green light time according to its position and speed.
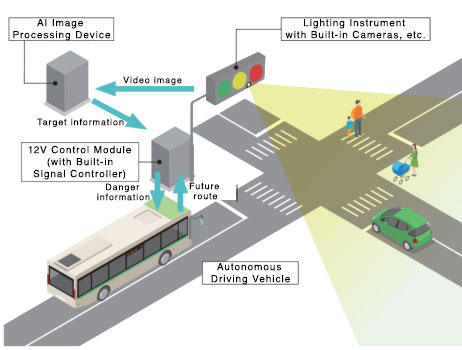
■ Nippon Signal’s Vehicle-Infrastructure Cooperative System
Based on the data obtained from sensors (cameras and LiDAR *2) installed in the ground infrastructure (traffic lights and roadsides), the AI image processing device identifies the types of objects (vehicles, people, etc.) in the path of an autonomous driving car and their target information (moving direction and speed). The I2V *3 control module built into the signal controller then calculates the collision risk using the future route information of the autonomous driving vehicle and information from the AI image processing device, and provides this to the autonomous driving vehicle as danger information, prompting the vehicle to speed up or stop.
*2 LiDAR (Light Detection And Ranging): A method of measuring the distance by irradiating an object with near-infrared light, visible light, or ultraviolet light and capturing the reflected light with an optical sensor
*3 I2V (Infrastructure to Vehicle): Road-to-vehicle communication from infrastructure to vehicles